5 paramètres d'usinage, Paramètres d'usinage, 5 p a ramètr es d'usinag e – HEIDENHAIN CNC Pilot 4290 Manuel d'utilisation
Page 369
CNC PILOT 4290 HEIDENHAIN
357
7.5 P
a
ramètr
es d'usinag
e
Suite: cf. page suivante
7.5
Paramètres d'usinage
Les paramètres d'usinage sont utilisés par la création du
plan de travail (TURN PLUS) et par divers cycles
d'usinage.
1 – Paramètres globaux pièce finie (rugosité/valeurs limites)
Tous les éléments de la pièce finie sont usinés en tenant compte
de „ORA et ORW“ (fonction: cycle de finition G890).
■
Type de rugosité [ORA] – Type de rugosité de surface
■
0:
sans indication de rugosité
■
1 – Rt:
profondeur de rugosité en [µm]
■
2 – Ra:
valeur moyenne de rugosité en [µm]
■
3 – Rz:
profondeur moyenne de rugosité en [µm]
■
4 – Vr:
indication directe de l'avance [mm/tour]
■
Valeurs de rugosité [ORW]: Valeurs de rugosité ou d'avance
■
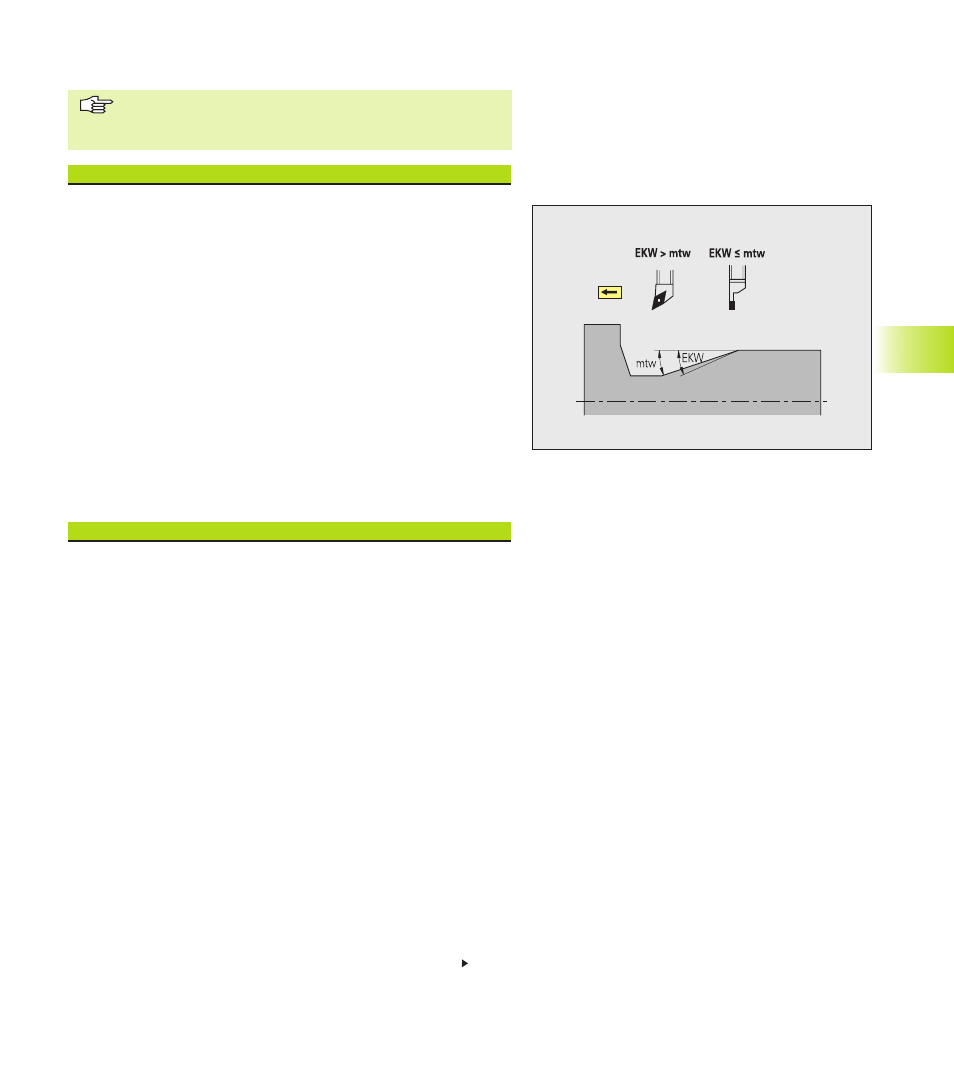
Angle de copiage rentrant [EKW]: Angle limite pour les zones de
contour en poussant pour distinguer entre le tournage et
l'usinage de gorge.
■
EKW > mtw: tournage libre
■
EKW <= mtw: gorge non définie (aucun élément de forme)
(mtw = angle de contour)
2 – Paramètres globaux de technologie
Sélection/changement d'outil, limitation de la vitesse de rotation
■
Outil de .. [WD] – Lors de la sélection de l'outil, TURN PLUS tient
compte:
■
1: de la composition actuelle de la tourelle
■
2: en premier lieu, de la composition actuelle de la tourelle, et
ensuite de la banque de données d'outils
■
3: de la banque de données d'outils
■
Tourelle TURN PLUS [RNR] – Condition requise „WD=1 ou
WD=2“. RNR définit quelle composition de tourelle sera utilisée:
■
0: composition actuelle de la tourelle (mode Machine)
■
1: composition tourelle propre à TURN PLUS (cf. „
6.10.2
Configuration de la liste d'outils“)
■
Type d'approche position de changement d'outil [WP] – Définit
le type d'approche et la position du point de changement d'outil.
Vous définissez l'ordre de déplacement des axes dans la CIP (ou
bien, avec la CAP, dans les paramètres d'usinage correspondants.
■
1: Approche de la position de changement avec trajectoires en
avance rapide (G0).
CIP – Définition du type d'approche et de la position de
changement: menu „Cycle – Approche point chgt outil“