Filet à trajectoire unique g33, 22 cy cles de filetag e – HEIDENHAIN CNC Pilot 4290 V7.1 Manuel d'utilisation
Page 249
CNC PILOT 4290 HEIDENHAIN
249
4.22 Cy
cles de filetag
e
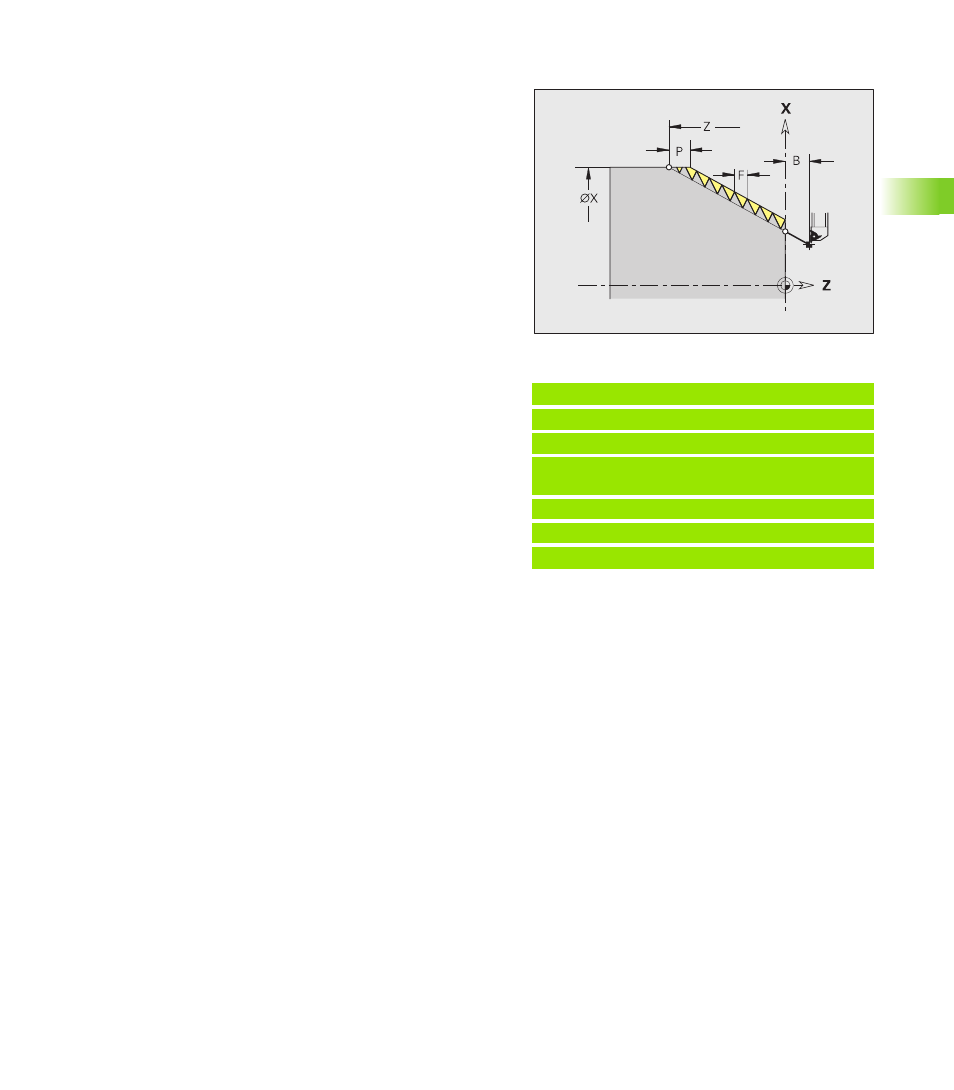
Filet à trajectoire unique G33
G33 exécute une seule coupe de filetage. Le sens du filet à trajectoire
unique est indifférent (filet longitudinal, conique ou transversal;
intérieur ou extérieur). En programmant successivement plusieurs
G33, vous créez un filet chaîné.
Si le chariot doit accélérez à l'avance d'usinage, positionnez l'outil à la
distance „Longueur d'approche B“ en amont du filet. Et tenez compte
de la „longueur de dépassement P“ avant le „point final du filet“ si le
chariot doit décélérer.
Longueur d'approche B: Pour accélérer jusqu'à l'avance
programmée, le chariot a besoin d'une course d'approche avant le filet
lui-même.
Longueur de dépassement P: Pour freiner, le chariot a besoin d'une
course de dépassement à la fin du filet. Notez que la course paraxiale
„P“ sera parcourue également lors d'une sortie oblique du filet.
Si le filet est usiné avec la pré-commande, la CNC PILOT vérifie la
longueur d'approche et de dépassement. Si les courses sont plus
courtes que le résultat de la formule suivante, la commande délivre un
avertissement.
Exemple: G33
. . .
N1 T5 G97 S1100 G95 F0.5 M3
N2 G0 X101.84 Z5
N3 G33 X120 Z-80 F1.5 [filet à trajectoire
unique]
N4 G33 X140 Z-122.5 F1.5
N5 G0 X144
. . .
Paramètres
X
Point final du filet (cote de diamètre)
Z
Point final du filet
F
Avance par tour (pas du filet)
B
Longueur d'approche (longueur de la trajectoire
d'accélération) – par défaut: 0
P
Longueur de dépassement (longueur de la trajectoire de
décélération) – par défaut: 0
C
Angle initial (le début du filet est définie par rapport aux
éléments de contour non symétriques en rotation – (par
défaut: 0)
Q
Numéro de la broche
H
Sens de référence pour le pas du filet (par défaut: 0)
H=0: Avance sur l'axe Z pour filet longitudinal et conique
jusqu'à +45°/–45° max. par rapport à l'axe Z
H=1: Avance sur l'axe X pour filet transversal et conique
jusqu'à +45°/–45° max. par rapport à l'axe X
H=3: Avance de trajectoire
E
Pas variable (par défaut: 0)
E=0: Pas de filet constant
E>0: Augmente le pas de vis de E par tour
E<0: Réduit le pas de vis de E par tour