Filtres anti-torsion -31, Compensation de phase -31, Filtre de déperdition et limiteur logique -31 – Basler Electric DECS-400 Manuel d'utilisation
Page 85
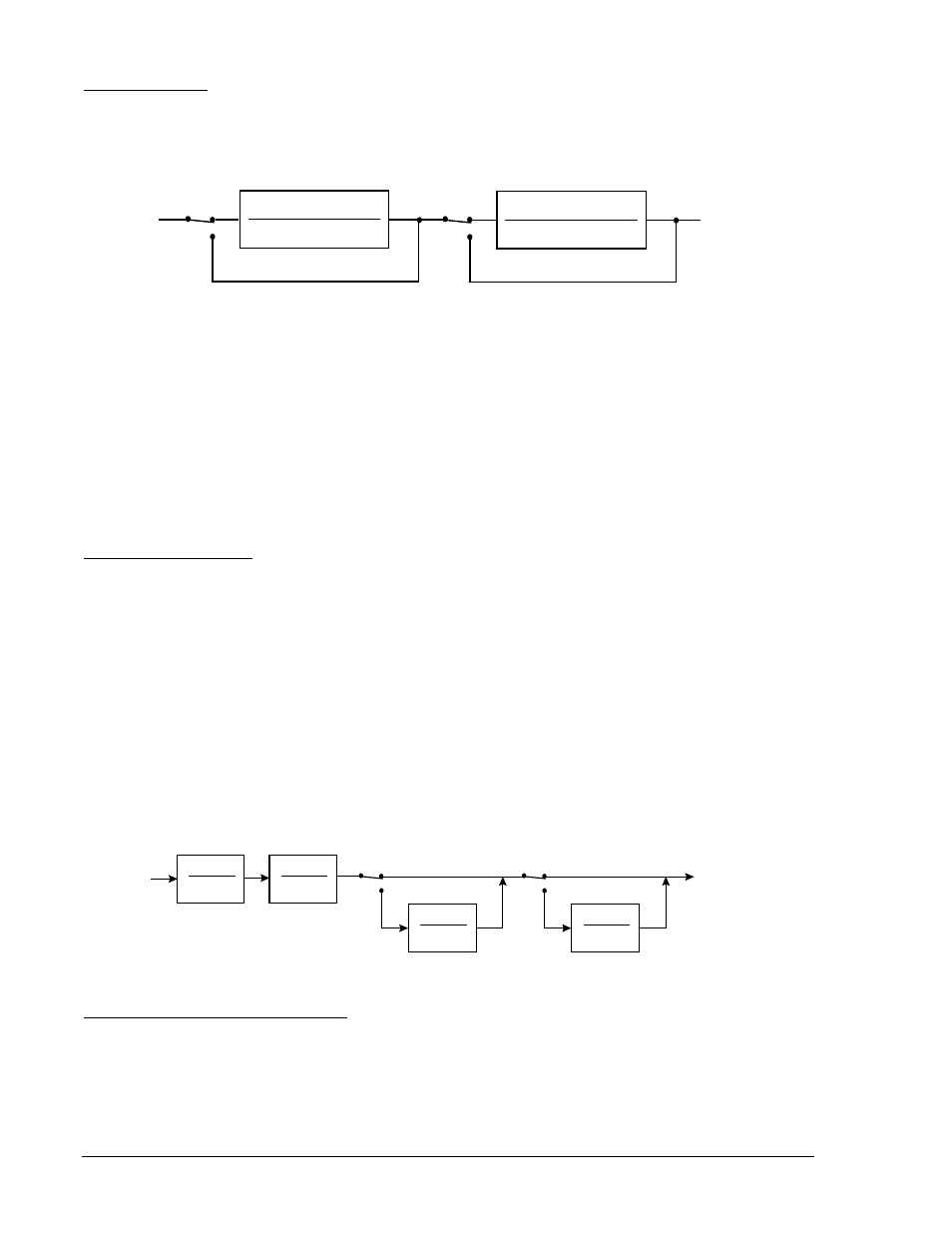
Filtres anti-torsion
Deux filtres anti-torsion, représentés dans la Figure 3-20, sont disponibles après le signal de stabilisation
et avant les blocs de compensation de phase. Les filtres anti-torsion fournissent la réduction de gain
voulue à une fréquence définie. Les filtres compensent les composantes de fréquence en torsion
présentes dans le signal d'entrée.
Figure 3-20. Filtres anti-torsion
Le commutateur virtuel SSW 4 active et désactive le filtre anti-torsion 1, et le commutateur virtuel SSW 5
active et désactive le filtre anti-torsion 2. Les commutateurs virtuels SSW 4 et SSW 5 peuvent être
configurés dans l'onglet Contrôle de l'écran PSS du logiciel BESTCOMS.
Les filtres anti-torsion 1 et 2 sont contrôlés par un numérateur de la fonction Zêta (Num. Zêta), un
dénominateur de la fonction Zêta (Dén. Zêta) et un paramètre de réponse en fréquence (Wn). La plage
de réglage des paramètres de numérateur de la fonction Zêta et de dénominateur de la fonction Zêta,
Num. Zêta 1, Num. Zêta 2, Dén. Zêta 1 et Dén. Zêta 2 est comprise entre 0 et 1, par incréments de 0,01.
La plage de réglage des paramètres de réponse en fréquence, Wn 1 et Wn 2, est comprise entre 10 et
150 rad/s, par incréments de 0,05 rad/s. Tous les paramètres de filtre anti-torsion peuvent être configurés
dans l'écran Paramètres de l'écran PSS du logiciel BESTCOMS.
Compensation de phase
Le signal de vitesse dérivé est modifié avant d'être appliqué à l'entrée du régulateur de tension. Le filtrage
du signal fournit l'avance de phase aux fréquences électromécaniques importantes (de 0,1 à 5 Hz).
L'exigence d'avance de phase est spécifique au site et doit compenser le retard de phase introduit par le
régulateur de tension à boucle fermée.
Quatre étapes de compensations de phase sont disponibles. À chaque étape de compensation de phase
sont associées une constate de temps d'avance de phase et une constante de temps de retard de phase.
La plage de réglage de chaque paramètre de constante de temps est comprise entre 0,001 et
6 secondes, par incréments de 0,001 seconde. Les paramètres de constante de temps peuvent être
configurés dans l'onglet Paramètres de l'écran PSS du logiciel BESTCOMS.
Normalement, les deux premières étapes d'avance-retard sont adaptées aux exigences de compensation
de phase d'une unité. Si nécessaire, les troisième et quatrième étapes peuvent être ajoutées à l'aide des
paramètres des commutateurs virtuels SSW 6 et SSW 7. Les commutateurs virtuels SSW 6 et SSW 7
peuvent être configurés dans l'onglet Contrôle de l'écran PSS du logiciel BESTCOMS. La Figure 3-21
illustre les étapes de compensation de phase et les commutateurs virtuels associés.
Figure 3-21. Étapes de compensation de phase
Filtre de déperdition et limiteur logique
La sortie des étapes de compensation de phase est connectée, via une étape de gain de stabilisateur, au
filtre de déperdition et au limiteur logique.
Le commutateur logiciel SSW 9 active et contourne le filtre de déperdition et le limiteur logique. Le
commutateur SSW 9 est accessible dans l'onglet Contrôle de l'écran PSS du logiciel BESTCOMS.
Le filtre de déperdition possède deux constantes de temps : normale et limite (inférieure à normale). La
plage de réglage de la constante de temps normale est comprise entre 5 et 30 secondes, par incréments
Stabilizing
Signal
2
2
2
2
2
2
n
n
d
n
n
n
w
s
w
z
s
w
s
w
z
s
+
+
+
+
2
2
2
2
2
2
n
n
d
n
n
n
w
s
w
z
s
w
s
w
z
s
+
+
+
+
Phase
Compensation
P0026-20
12-09-04
Disable
SSW 5
SSW 4
Enable
Disable
Enable
1 + s T
1
1 + s T
2
1 + s T
3
1 + s T
4
PSS Output Before
Gain and Limits
Stabilizing
Signal
Include
Exclude
SSW 6
1 + s T
5
1 + s T
6
SSW 7
1 + s T
7
1 + s T
8
P0026-21
12-09-04
Include
Exclude
9369770990 Rev R
DECS-400 - Description fonctionnelle
3-31