Basler Electric DECS-400 Manuel d'utilisation
Page 114
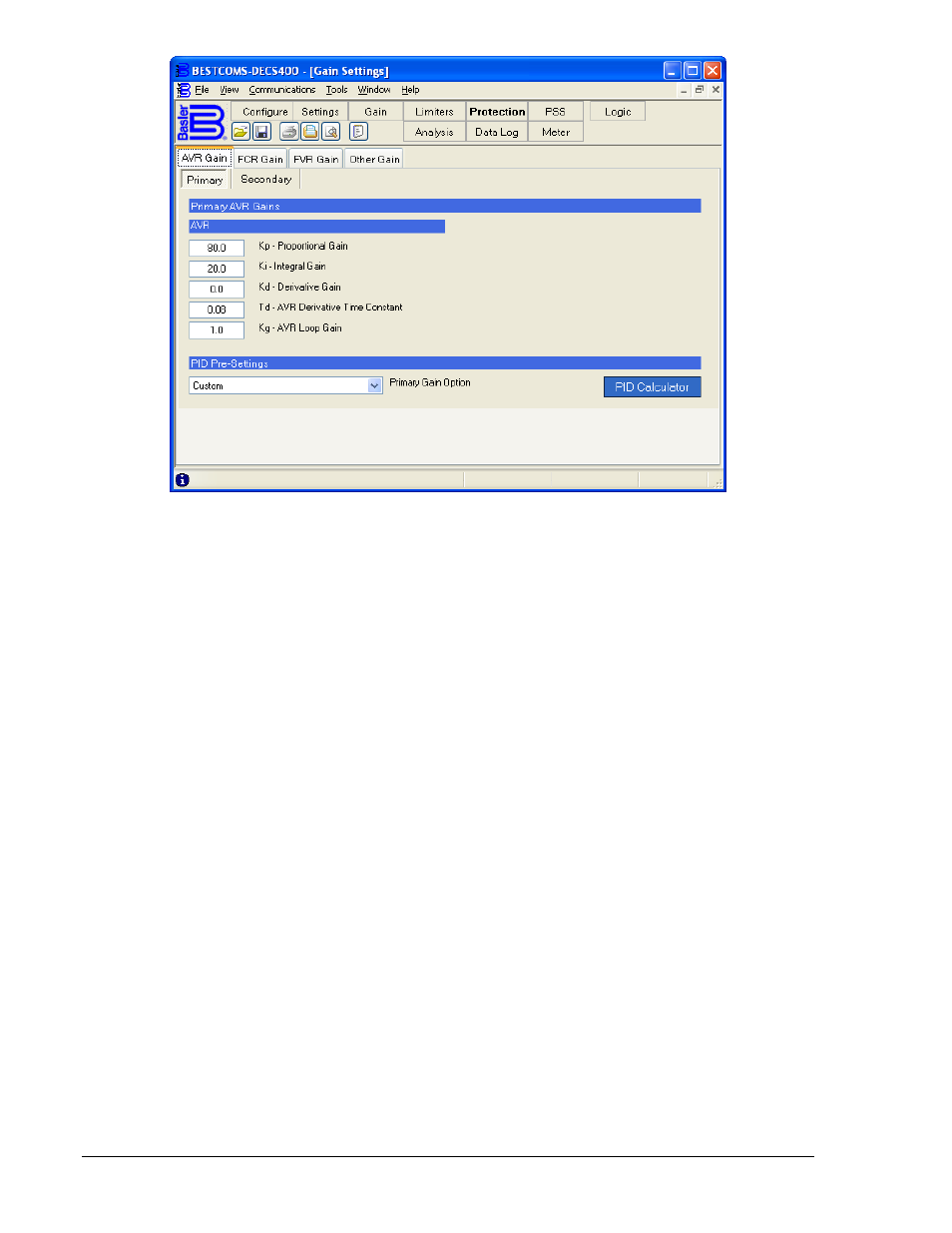
Figure 4-17. Écran Paramètres de gain, onglet Gain AVR
AVR - Gain proportionnel Kp : ce paramètre permet de sélectionner le paramètre de stabilité de constante
proportionnelle (Kp). Le système DECS-400 fournit une valeur de sortie qui est équivalente au paramètre
Kp multiplié par l'erreur entre le point de consigne de la tension et la tension de sortie réelle de
l'alternateur. La plage de valeurs autorisées est comprise entre 0 et 1 000,0, par incréments de 0,1. Ce
paramètre est activé uniquement lorsque Personnalisé est sélectionné pour Option de gain principal dans
la section Pré-réglages PID.
Lors de l'ajustement du gain proportionnel, les règles suivantes doivent être prises en compte. Si la
réponse transitoire présente une crête de dépassement trop importante, la valeur Kp doit être abaissée.
Si la réponse transitoire est trop lente ou si elle présente une crête de dépassement très faible, il faut
augmenter la valeur Kp.
AVR - Gain intégral Ki : ce paramètre permet de sélectionner le paramètre de stabilité de constante
intégrale (Ki). Le système DECS-400 fournit une valeur de sortie qui est équivalente au paramètre Ki
multiplié par l’intégrale de l'erreur entre le point de consigne de la tension et la tension de sortie réelle de
l'alternateur. La plage de valeurs autorisées est comprise entre 0 et 1 000,0, par incréments de 0,1. Ce
paramètre est activé uniquement lorsque Personnalisé est sélectionné pour Option de gain principal dans
la section Pré-réglages PID.
Si le temps nécessaire pour atteindre l'état d'équilibre est jugé trop long, la valeur Ki doit être augmentée.
AVR - Gain dérivé Kd : ce paramètre permet de sélectionner le paramètre de stabilité de constante
dérivée (Kd). Le système DECS-400 fournit une valeur de sortie qui est équivalente au paramètre Kd
multiplié par la dérivée de l'erreur entre la consigne de la tension et la tension de sortie réelle de
l'alternateur. La plage de valeurs autorisées est comprise entre 0 et 1 000,0, par incréments de 0,1. Ce
paramètre est activé uniquement lorsque Personnalisé est sélectionné pour Option de gain principal dans
la section Pré-réglages PID.
Si la réponse transitoire présente une résonance trop importante, la valeur Kd doit être augmentée.
AVR - Constante de temps de dérivée AVR Td : ce paramètre permet d'éliminer l'effet de bruit sur la
différenciation numérique. La plage de valeurs autorisées est comprise entre 0 et 1,00, par incréments de
0,01.
AVR - Gain de boucle AVR Kg : ce paramètre définit le niveau général de gain de boucle de l'algorithme
PID pour le mode AVR. La plage de valeurs autorisées est comprise entre 0 et 1 000,0, par incréments
de 0,1.
4-22
DECS-400 - Logiciel BESTCOMS
9369770990 Rev R