8 elimination des défauts, Elimination des défauts, Beckhoff – BECKHOFF AX2000 Manuel d'utilisation
Page 90
9.8
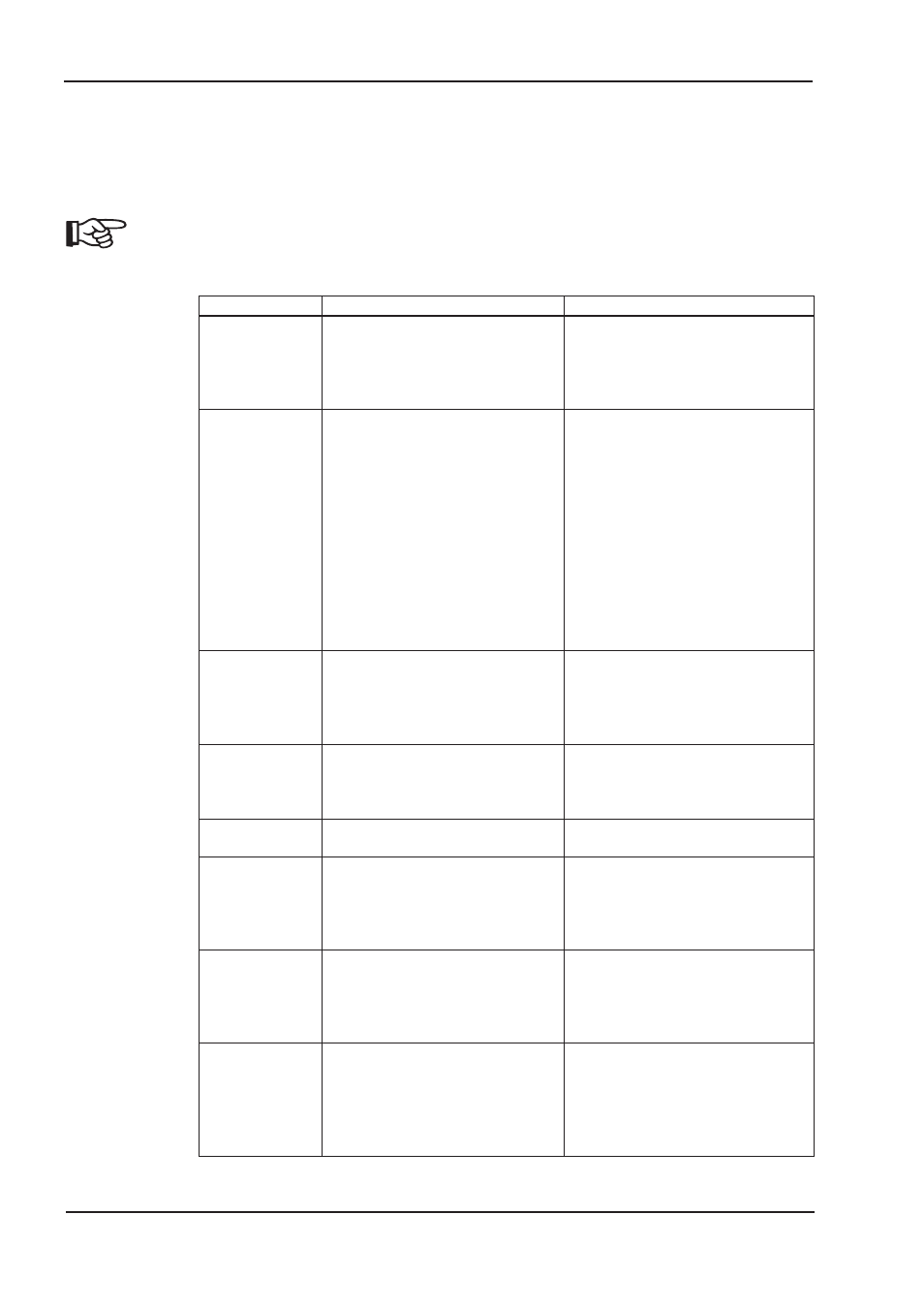
Elimination des défauts
En fonction des spécifications de votre installation, différentes causes peuvent être à la source du
défaut apparu. En présence de systèmes multiaxes, d'autres causes d'erreur cachées peuvent
apparaître.
Vous trouverez des informations relatives à la réparation des anomalies dans le
paragraphe « Elimination de dérangements» de l’aide en ligne.
Notre Département Applications est à votre disposition pour vous aider en cas de problèmes.
Défaut
Causes probables du défaut
Remède
Message de dé-
faut
Dérangement de
communication
— utilisation d'un câble pas correcte
— le câble n'est pas enfiché sur le
bon emplacement
— mauvaise interface PC
sélectionnée
— utiliser un câble modem zéro
— enficher le câble sur
l'emplacement correct
— sélectionn*er l'interface correcte
Le moteur ne
tourne pas
— le variateur n'est pas validé
— coupure du câble de val. de
consignes
— les phases moteur permutées
— le frein n'est pas desserré
— le système est mécaniquement
bloqué
— le nombre de pôles du moteur
n'est pas correctement réglé
— la rétroaction n'est pas
correctement réglée
— appliquer le signal ENABLE
— vérifier le câble de va. de
consignes
— posez les phases moteur
correctement
— vérifier la commande
d'excitation du frein
— vérifier la mécanique
— régler le paramètre “nombre
de pôles du moteur"
— régler la rétroaction
correctement
Le moteur vibre
— l'amplification est trop élevée
(régulateur de vitesse)
— le blindage du câble de
rétroaction est coupé
— AGND n'est pas câblée
— diminuer KP
(régulateur de vitesse)
— remplacer le câble de
rétroaction
— relier l'AGND à la CNC-GND
Le servosystème
signale un défaut
de poursuite
— Irms ou lpeak réglé trop faible
— rampe de valeur de consigne
trop grande
— augmenter Irms ou lpeak (en
observant les données moteur !)
— diminuer la Rampe SW +/-
Le moteur de-
vient trop brûlant
— réglage trop important de
Irms/Ipeak
— diminuer Irms/Ipeak
Le servosystème
est trop lâche
— KP (régul. de vitesse) trop faible
— Tn (régulateur de vitesse) trop
grande
— PID-T2 trop grande
— T-tachy trop grande
— augmenter KP (régul. de vitesse)
— Tn (régulateur de vitesse),
valeur implicite du moteur
— réduire PID-T2
— réduire T-tachy
Le servosystème
ne tourne pas en
souplesse
— KP (régul. de vitesse) trop grande
— Tn (régulateur de vitesse) est
trop faible
— Pl D-T2 trop faible
— T-tachy trop faible
— réduire KP (régula. de vitesse)
— Tn (régulateur de vitesse),
valeur implicite du moteur
— augmenter PID-T2
— augmenter T-tachy
L'arbre dérive à
valeur de consig-
ne=0V
—
l'offset pour la valeur de
consigne prédéfinie analogique
n'est pas correctement équilibré
—
l'AGND n'est pas reliée à la
CNC-GND de l'automate
programmable
— équilibrer l'offset VC
(Analog I/O)
— relier l'AGND et la CNC-GND
90
AX 2001...2020 Manuel du Produit
Mise en service
07/2007
BECKHOFF