HEIDENHAIN PT 855 for Turning Manuel d'utilisation
Page 6
I - 1
Principes de base pour les coordonnées de positions
POSITIP 855
Guide de l'utilisateur
7
+Y
+X
+Z
–Z
–Y
–X
Z
X
I - 1
Principes de base pour les coordonnées de positions
Si les termes suivants vous sont familiers (système de coor-
données, mesure incrémentale, absolue, position nominale,
position effective et chemin restant), sautez ce chapitre.
Introduction
Pour décrire la géométrie d'une pièce, on utilise un système de
coordonnées cartésiennes ( = système de coordonnées rectangu-
laires, du mathématicien et philosophe français René Descartes,
1596 à 1650).
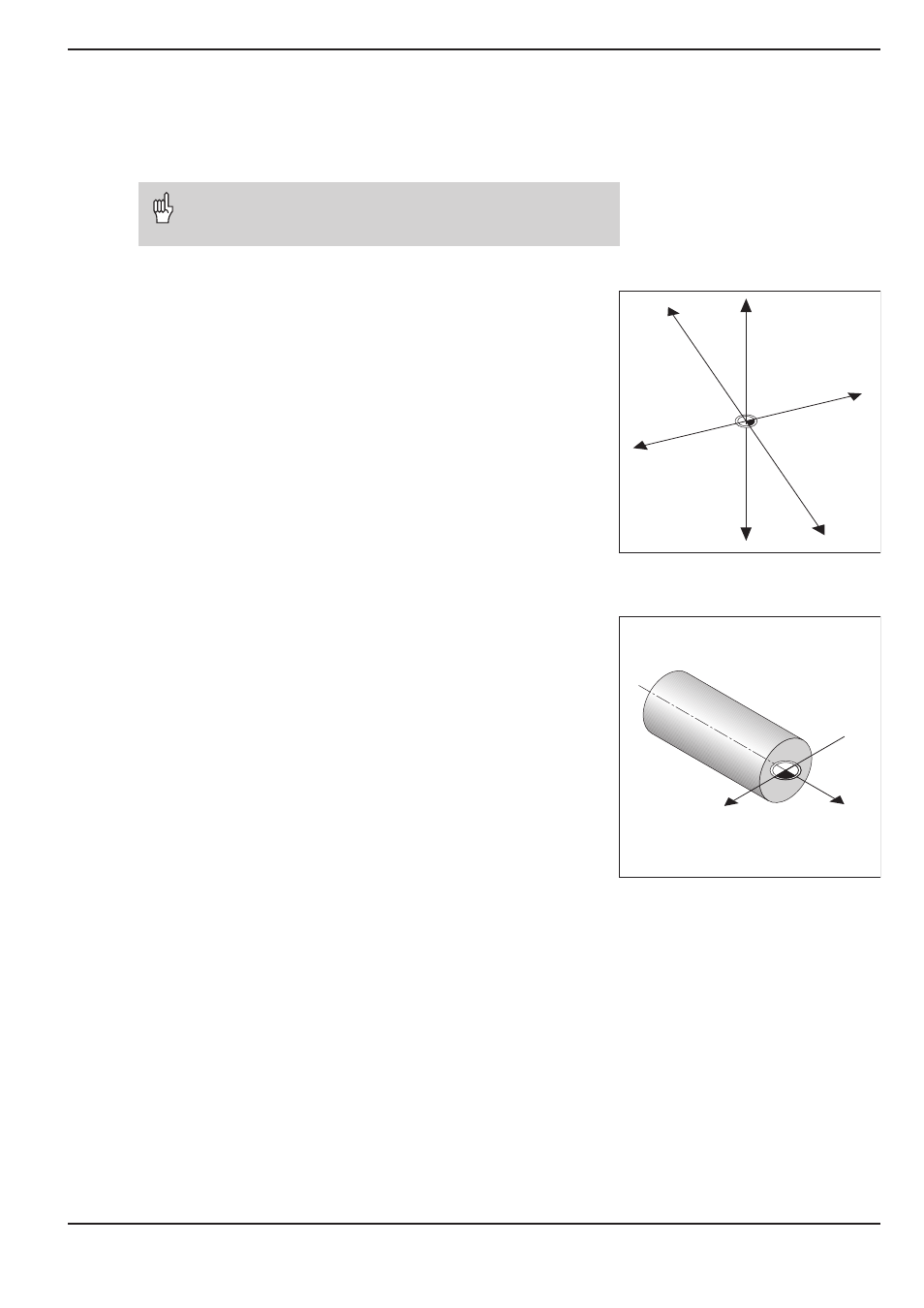
Le système de coordonnées cartésiennes se compose des trois
axes de coordonnées X, Y et Z perpendiculaires entre eux et qui
se rejoignent en un point appelé point zéro du système de coordon-
nées.
Pour déterminer des positions sur une pièce, on pose de manière
abstraite le système de coordonnées sur celle-ci.
Lorsqu'il s'agit de pièces de tournage (pièces symétriques en
rotation), l'axe Z coïncide avec l'axe de rotation. L'axe X est dirigé
dans le sens du rayon ou du diamètre. Les données de l'axe Y ne
sont pas nécessaires pour les pièces de tournage dans la mesure
où elles décriraient les mêmes valeurs que celles de l'axe X.
Fig. 1:
Le système de coordonnées
cartésiennes
Fig. 2:
Le système de coordonnées car-
tésiennes sur une pièce de tournage