Basler Electric DECS-100 Manuel d'utilisation
Page 62
5-8
DECS-100 BESTCOMS™ Software
9287570991 Rév M
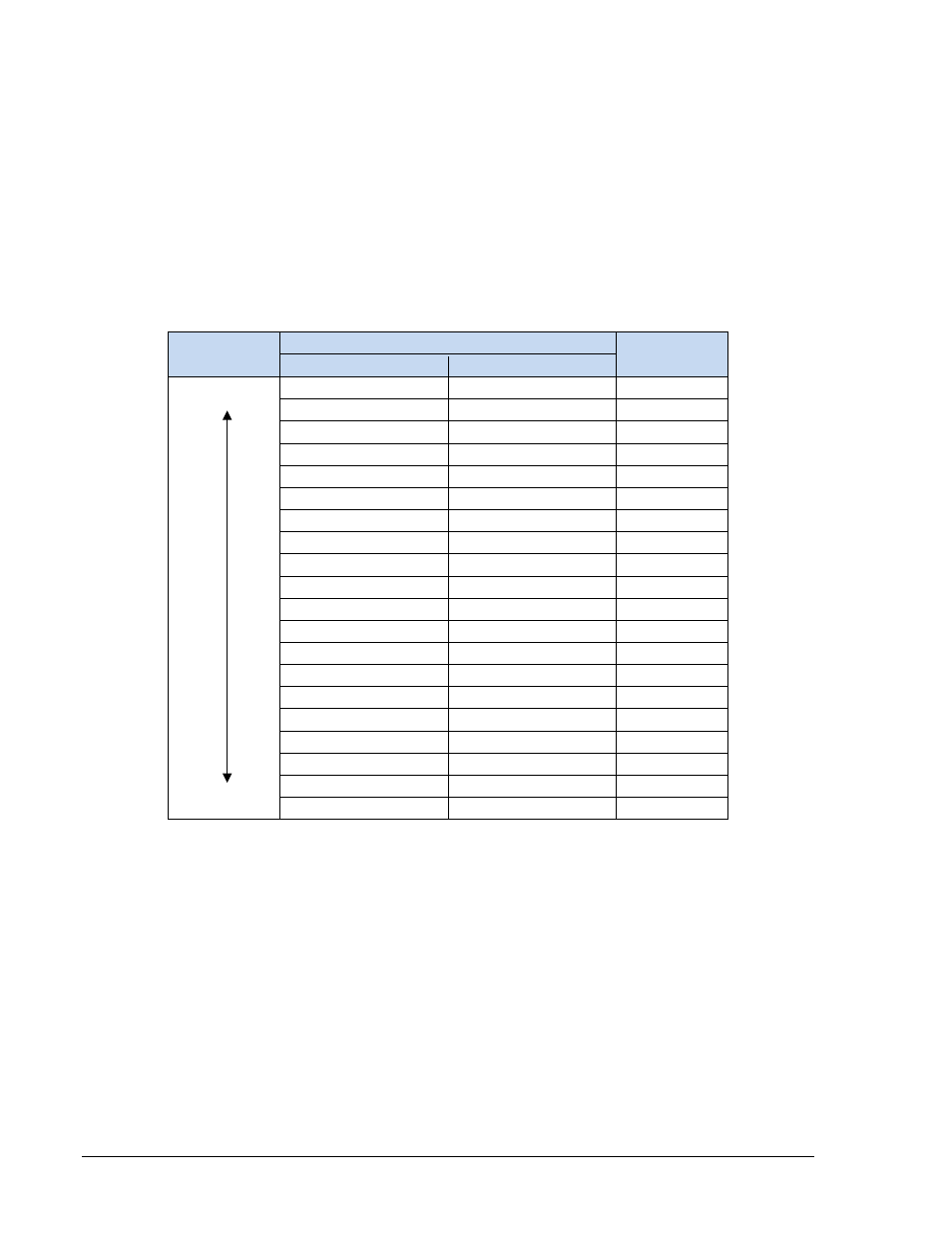
Plage de Stabilité. Ce paramètre choisit l’une des 20 plages de stabilité pré-définies dans le DECS-100.
Un guide pour choisir la plage de stabilité est indiqué au Tableau 5-1. Un paramètre de 21 permet de
saisir des paramètres de stabilité personnalisés dans la fenêtre PID de BESTCOMS. De plus amples
renseignements sur la fenêtre PID sont fournis plus loin sous le titre Fenêtre PID. Lorsque la Plage de
Stabilité est de 21, le bouton PID peut être choisi pour accéder à la fenêtre PID. Un paramètre de Plage
de Stabilité de 1 à 20 désactive le bouton PID et empêche d’accéder à la fenêtre PID.
AVR/FCR – Gain de Proportionnelle KP. Ce paramètre choisit le paramètre de stabilité de constante
proportionnelle (KP). Le DECS-100 fournit une valeur équivalente à la valeur KP multipliée par l’erreur
entre le point de consigne de tension et la tension de sortie réelle de la génératrice. Des valeurs KP de 0
à 1000 peuvent être saisies par incréments de 0,001.
Respectez les indications suivantes pour ajuster la valeur KP. Si la réponse transitoire présente trop de
surdépassement, la valeur KP doit être diminuée. Si la réponse transitoire est trop lente, la valeur KP doit
être augmentée.
Tableau 5-1. Paramètres de la Plage de Stabilité du DECS-100
Generator
Size
Constantes de Temps
Plage de
Stabilité
Génératrice
(T’do)
Excitatrice
(Texc)
PETITE
1.0
0.17
1
1.5
0.25
2
2.0
0.33
3
2.5
0.42
4
3.0
0.50
5
3.5
0.58
6
4.0
0.67
7
4.5
0.75
8
5.0
0.83
9
5.5
0.92
10
6.0
1.00
11
6.5
1.08
12
7.0
1.17
13
7.5
1.25
14
8.0
1.33
15
8.5
1.42
16
9.0
1.50
17
9.5
1.58
18
10.0
1.67
19
GRANDE
10.5
1.75
20
AVR/FCR – Gain d’Intégrale KI. Ce paramètre choisît le paramètre de stabilité de constante intégrale
(KI). Le DECS-100 fournit une valeur équivalente à la valeur KI multipliée par l’intégrale de l’erreur entre
le point de consigne de tension et la tension de sortie réelle de la génératrice. Des valeurs KI de 0 à 1000
peuvent être saisies par incréments de 0,001.
Augmenter la valeur KI diminue le temps nécessaire pour atteindre le régime permanent.
AVR/FCR – Gain de Dérivée KD. Ce paramètre choisit le paramètre de stabilité de constante dérivée
(KD). Le DECS-100 fournit une valeur de sortie équivalente à la valeur KD multipliée par la dérivée de
l’erreur entre le point de consigne de tension et la tension de sortie réelle de la génératrice. Des valeurs
KD de 0 à 1000 peuvent être saisies par incréments de 0,001.
Augmenter la valeur KD réduit l’oscillation de réponse transitoire.
Fonction AVR/FCR – Gain dérivatif TD » Ce paramètre permet de réduire les effets de bruit sur les
différentiations numériques. Il est possible de renseigner une valeur allant de 0 à 1 par incréments de
0.01. Les valeurs typiques de la fonction TD se situent entre 0.01 et 0.03.
AVR/FCR AVR<=Gain en Boucle Ouverte Kg=>FCR. Ce paramètre règle le niveau de gain en boucle
ouverte de l’algorithme PID. Des valeur de Gain en Boucle Ouverte de 0 à 1000 peuvent être saisies pour
le fonctionnement en AVR et FCR par incréments de 0,01.