Systèmes de coordonnées – HEIDENHAIN PT 880 Manuel d'utilisation
Page 12
12
I Instructions d'utilisation
I – 1 Pr
incipes de base pour les coor
données de positions
I – 1 Principes de base pour les
coordonnées de positions
Systèmes de coordonnées
Par principe, la définition des positions requiert un système de
référence.
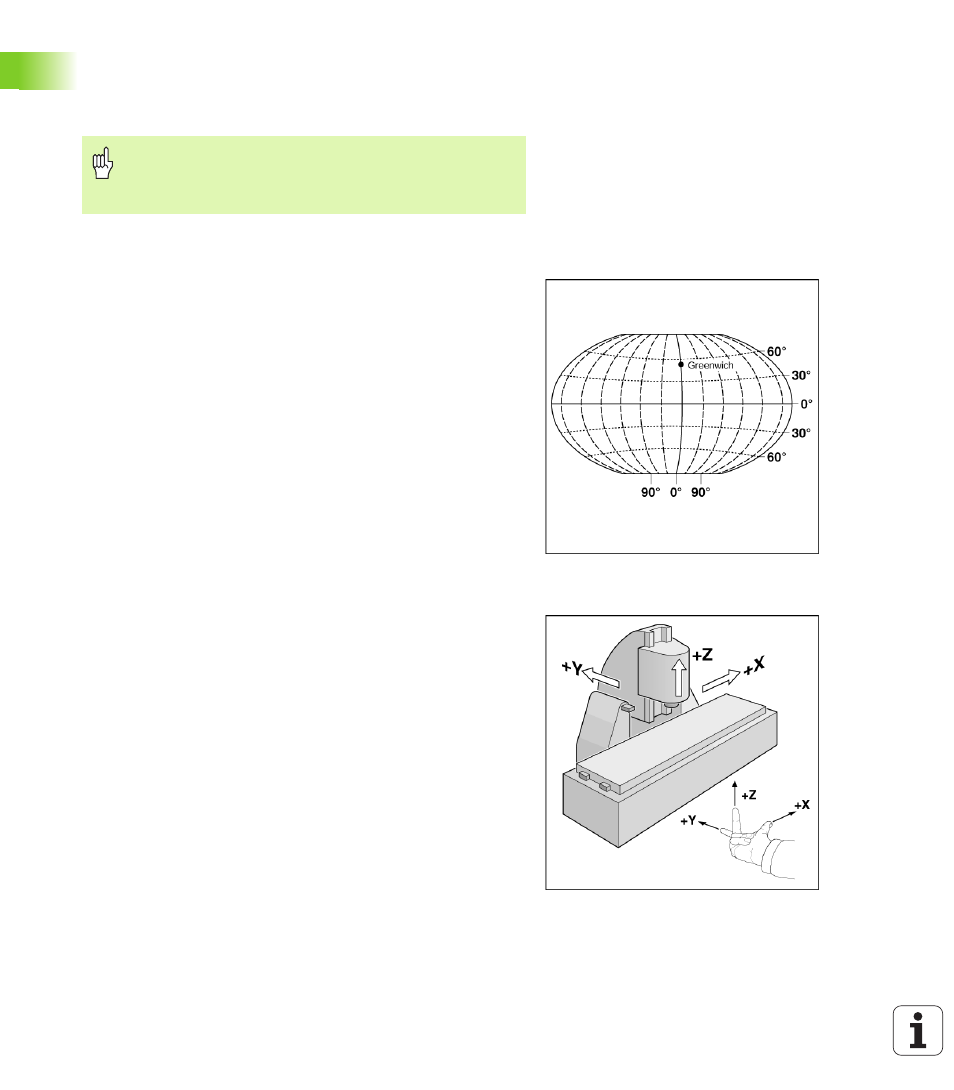
Ainsi, par exemple, des lieux terrestres peuvent être définis par leurs
coordonnées géographiques de „longueur“ et de „largeur“ données
en valeur absolue. Contrairement à une indication de position relative
qui se réfère à un lieu connu, le réseau formé par les cercles de
longitude et de latitude représente un système absolu de
coordonnées. Cf. fig. I.1.
Pour usiner une pièce sur une fraiseuse, on prend pour base un
système de coordonnées cartésiennes (orthogonales, du
mathématicien et philosophe français René Descartes; 1596 à 1650)
défini par rapport à la pièce. Le système de coordonnées cartésiennes
se compose des trois axes de coordonnées X, Y et Z parallèles aux
axes de la machine.
La règle des trois doigts décrite en bas et à droite (fig. I.2) illustre les
directions des trois axes: Si le majeur de la main droite est dirigé dans
le sens de l'axe d'outil et pointe de la pièce vers l'outil, il indique le
sens positif de l'axe Z; le pouce, quant-à lui, indique le sens positif de
l'axe X, et l'index, le sens positif de l'axe Y.
Si les termes suivants vous sont familiers (système de
coordonnées, mesure incrémentale, absolue, position
nominale, position effective et chemin restant), sautez ce
chapitre.
fig. I.1
Le système de coordonnées géographiques
est un système de référence absolu.
fig. I.2
Désignation et sens des axes de la machine
sur une fraiseuse