BECKHOFF KL4031 Manuel d'utilisation
Page 18
Annexe
16
KL4031, KL4032 et KL4034
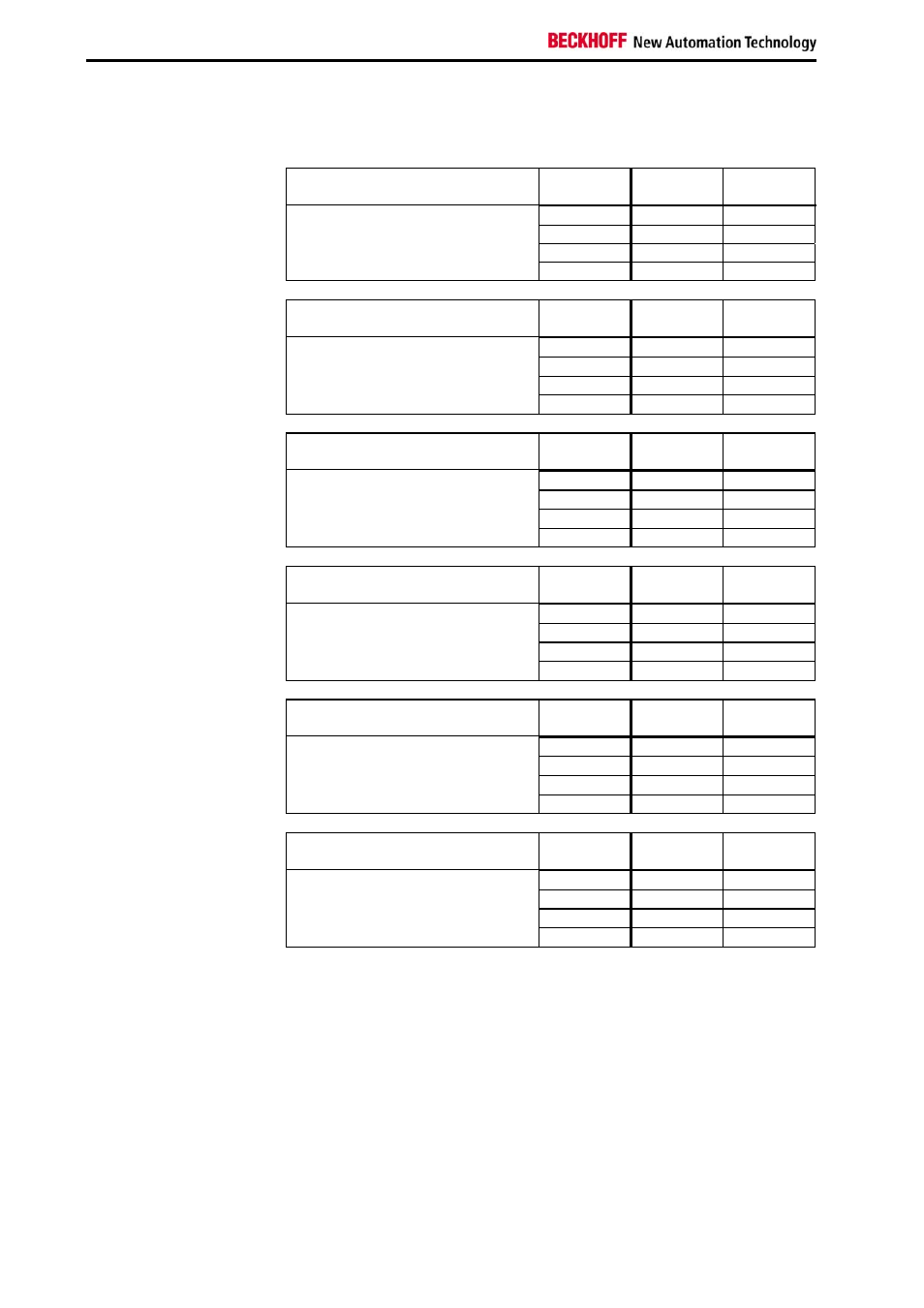
KL4032
Conditions Décalage-
mot
Octet de
poids fort
Octet de
poids faible
Évaluation complète : non
0
Ch0 D1
Ch0 D0
Format-Motorola :
non
1
Ch1 D1
Ch1 D0
Alignement de mot :
indifférent
2
-
-
Mappage par défaut pour :
CANopen, CANCAL,
DeviceNet, ControlNet,
Modbus, RS232, RS485
3
-
-
Conditions Décalage-
mot
Octet de
poids fort
Octet de
poids faible
Évaluation complète : non
0
Ch0 D0
Ch0 D1
Format-Motorola :
oui
1
Ch1 D0
Ch1 D1
Alignement de mot :
indifférent
2
-
-
Mappage par défaut pour :
Profibus, Interbus
3
-
-
Conditions Décalage-
mot
Octet de
poids fort
Octet de
poids faible
Évaluation complète : oui
0
Ch0 D0
Ch0 CB/SB
Format-Motorola :
non
1
Ch1 CB/SB
Ch0 D1
Alignement de mot :
non
2
Ch1 D1
Ch1 D0
3
-
-
Conditions Décalage-
mot
Octet de
poids fort
Octet de
poids faible
Évaluation complète : oui
0
Ch0 D1
Ch0 CB/SB
Format-Motorola :
oui
1
Ch1 CB/SB
Ch0 D0
Alignement de mot :
non
2
Ch1 D0
Ch1 D1
3
-
-
Conditions Décalage-
mot
Octet de
poids fort
Octet de
poids faible
Évaluation complète : oui
0
Rés.
Ch0 CB/SB
Format-Motorola :
non
1
Ch0 D1
Ch0 D0
Alignement de mot :
oui
2
Rés.
Ch1 CB/SB
Mappage par défaut pour :
Lightbus, Ethernet,
contrôleur de bornes d'E/S
(BCxxxx)
3
Ch1 D1
Ch1 D0
Conditions Décalage-
mot
Octet de
poids fort
Octet de
poids faible
Évaluation complète : oui
0
Rés.
Ch0 CB/SB
Format-Motorola :
oui
1
Ch0 D0
Ch0 D1
Alignement de mot :
oui
2
Rés.
Ch1 CB/SB
3
Ch1 D0
Ch1 D1
Légende
Voir mappage du KL4031.